- HOME
- コラム
- プラント・工場施設検査
- 四足歩行ロボットSpotと、搭載可能なペイロードについて詳細解説します
2025.05.16
Contents
四足歩行ロボットSpotと搭載可能なペイロードの詳細解説
1. Spot本体の概要
「Spot」は、米国Boston Dynamics社が開発した四足歩行型のロボットで、2020年に商業販売が開始されました。これにより、産業分野や建設業、インフラ点検、調査など、多岐にわたる業界での利用が可能になりました。Spotは、特に不整地や階段、複雑な地形でも高い安定性と機動性を発揮し、人がアクセスできない場所での作業を代行することができるため、特に建設現場や工場、プラントなどの点検・監視作業で活用されています。
Spotの大きな特徴は、その機動性です。4つの独立した足を持ち、歩行時には地面をしっかりと捉えながらも、軽快に移動できます。さらに、Spotは自律的に行動する能力を備えており、事前に設定したルートに沿って自動で移動したり、障害物を避けたりしながら作業を行うことができます。加えて、バッテリーの稼働時間は最大で約2時間程度ですが、設置した充電ステーションに自動的に戻って充電することも可能です。
主な仕様
- 重量:約25kg
- 最大速度:1.6m/s(約5.8km/h)
- 稼働時間:最大約90分(ペイロード依存)
- 防塵・防水:IP54準拠
- 操作方法:遠隔操作および自律走行
出典: 東北エンタープライズ株式会社
https://www.tohoku-enterprise.com/products/cautious/478/
2. ペイロード別機能詳細
Spotに搭載可能なペイロードが多岐にわたり、用途に応じてさまざまなセンサーや機器を取り付けることができます。これにより、現場での作業を効率的に支援することができ、従来では難しかった作業を安全かつ正確に行うことが可能です。以下では、主要なペイロードの種類と、それぞれの活用事例を詳述します。
2.1 Spotアーム(Spot Arm)
Spotアーム(Spot Arm)は、Boston Dynamics社が開発した多関節型のロボットアームで、四足歩行ロボット「Spot」の拡張性を飛躍的に高める中核的なペイロードのひとつです。6自由度(6 DoF)+エンドエフェクタ(グリッパー)を有し、繊細な把持・操作から、重量物のハンドリングまで、人間の上肢に相当する柔軟な動作を再現可能です。

◆ 主な特長
- 柔軟な把持動作
曲面や非定形の物体も確実に掴むことが可能。アーム先端にはビジョンシステムとフォースセンサが組み込まれており、対象物の材質や形状を判断しながら、適切な力加減で操作を行います。 - 環境とのインタラクション
スイッチ、バルブ、ドアノブなど、現実環境のインターフェースと直接的にやり取りできます。センサ情報に基づき、環境に応じた動作修正が可能です。 - 自律的な操作ルーチン
アームには、Spotのナビゲーション機能と連動したタスク自動化が可能で、「目的地に移動 → ドアを開ける → 撮影 → 移動」など一連の動作を自律実行できます。
◆ 用途例
■ 危険区域でのスイッチ操作
- 放射線や高温など、人が立ち入ることができない設備内でのスイッチのオン・オフ操作。
- 例:火力発電所のボイラー室内での非常停止ボタンの操作
■ 検査装置の位置変更
- Spotに搭載した検査センサ(例:赤外線カメラ、超音波検査装置など)をターゲット対象へ自動的に移動・調整。
- 例:トンネル壁面の音響検査時の向きを対象に合わせて角度調整
■ 人間作業者の補助動作
- 工場やプラントの定期巡回中、Spotアームでバルブを開閉したり、異常音が出ている部品を指差し撮影する動作など、作業者の負担を低減。
- 例:老朽化設備の巡回点検中にバルブ開閉+音源撮影を一体化
■ 搬送補助や拾得作業
- 検査後に異物を回収する、または落下した工具を自動で拾い上げるような動作も可能。
- 例:夜間点検時に発見された部品片を回収してベース位置まで運搬

出典: Spot Arm/Boston Dynamics
https://bostondynamics.com/products/spot/arm/
2.2 SpotCAM(カメラペイロード)
SpotCAM は、四足歩行ロボット Spot に搭載可能な視覚情報収集用ペイロード群の総称であり、点検・監視・記録といった幅広い業務に対応するための高度なイメージング機能を提供します。
RGBカメラ(可視光)、IRカメラ(赤外線)、360度パノラマカメラ、ズーム機能などを組み合わせることで、「人間の目」としてのSpotの役割を果たします。
施設内の定期巡回や状況確認に最適です。
◆ 機能特長
- 遠隔監視・双方向通信
タブレットまたはPCからリアルタイムに映像を確認しながら、Spotを操作可能。
異常を見つけた際にはその場で対応動作(撮影・報告・移動)を指示。 - 自動巡回点検の記録装置
自律巡回ルートに沿って、日時・位置情報とともに記録。
後から点検比較に活用できるため、傾向分析や予兆保全にも有効。
◆ 用途例(実務適用シナリオ)
■ 工場・プラントでの設備点検
- 高温設備付近の赤外線監視
- モーター・ポンプの動作状況を遠隔から視覚確認
- 配電盤やブレーカーの局所過熱の可視化(火災予防)
■巡視や非常時監視
- 無人施設巡回点検
- 非常警報後の現地確認を人的リスクなく実施
■ 長期・定点記録(Before/After比較)
- 定期点検において、ログの蓄積と傾向分析を実施
- Spotが取得した記録映像をクラウドへ自動アップロード(通信機器と併用)
- SpotCAM+ IR(赤外線対応)
◆ 他ペイロードとの連携
SpotCAMは、他のセンサーモジュールと併用可能です。
たとえば、温度異常の視認(SpotCAM)→ 超音波による漏れ検出のような連携で、点検の精度と確度を飛躍的に向上させることが可能です。

2.3 超音波計測機
音響画像センサーであり、設備の「聞こえない異常音」を可視化する目的で設計されたデバイスです。Spotに搭載することで、これまで人間や既存のセンサーでは検出が難しかった超音波帯域の音(例えば、空気・ガスの微細なリーク)を自動で検知でき、設備の予知保全・予防保全を実現します。
Spot上で常設型センサーを「移動型プラットフォーム」として運用することにより、広範囲を効率的かつ定期的にカバーできるという特長があります。
◆ 主な機能と運用特長
■ 超音波による異常検知
人間の耳では聞こえない高周波音(例:20kHz以上)を捉えることができ、機械設備が劣化・損傷している兆候を早期にキャッチします。
■ 音源位置の特定とヒートマップ表示
内蔵された64個のマイクから集音したデータをもとに、音源の方向・位置を可視化し、Spotのタブレット画面上で直感的に表示可能。異常部位の特定が容易です。
■ Spotによる移動点検の自動化
本来は「固定監視」が前提の器材をSpotに搭載することで、移動しながらの定期監視(音響スキャン)が実現。点検ルートに沿って、複数箇所の比較計測や異常のトレンド監視が可能です。
◆ 主な用途事例
■ 配管のエアリーク検知
圧縮空気・蒸気・ガス配管などの継手部・バルブ・フランジからの微細な漏れ音を自動検出。人的な巡回では難しい微弱リークにも対応。
■ バルブ・圧力弁の異常音監視
弁内部の摩耗・詰まりなどによる異音や共振を定量的に記録し、点検要否を判断。
■ ベアリングや駆動部の摩耗兆候の聴音検査
従来の振動加速度センサと併用することで、回転機械の健全性評価の信頼性が向上。
■ クリーンルーム・高騒音環境下での異常音検知
環境騒音に埋もれた異常音も周波数解析により背景から分離・可視化可能。
◆ 他ペイロードとの連携運用
他のペイロードと組み合わせることで、「音」「ヴィジュアル」「振動」のマルチモーダルなセンシングが可能になります。
例:
- SpotCAMによる設備外観の撮影
- 3Dレーザースキャナーで全貌の3Dデータ化
- 異常音源の特定
- 振動の可視化
このような組み合わせにより、単一センサーでは見逃す兆候を多角的にカバーできます。
また、複数機材を組み合わせたより多角的な成果物を作成できます。
◆ 活用シーン(導入先の想定)
電力施設/水処理施設:異常音監視、予防保全型の巡回点検
製造業(自動車、電子、食品など):エアリーク点検、静音設備の品質維持
化学・プラント業界:高圧ガス漏洩の早期発見、安全対策

2.4 振動可視化カメラ
微細振動の視覚化に特化したカメラで、設備の劣化や不具合の予兆を非接触・非破壊で把握できます。わずかな変位や機械振動、構造物のたわみといった兆候を映像上で色や動きとして検出・記録することができ、異常診断・予防保全・設計評価において非常に高い有用性を発揮します。
Spotに搭載することで、固定設置が困難な場所でも自動巡回による振動診断が可能となり、巡回業務やインフラ健全性調査の省人化と高精度化が実現します。
◆ Spot搭載時の利点
- 場所に依存しない振動診断
常設が難しいプラント・発電所・橋梁などでも、Spotが移動して対象設備前に自律停止→撮影・記録→移動を繰り返すことで診断を自動化。 - 人が立ち入れない場所での観察
高所・狭所・高温領域・危険エリアでも、人手を介さず安全にデータ取得が可能。 - 定点観測から面的観測へ
既存の振動診断が1点ずつの記録だったのに対し、広範囲を一度に測定・可視化可能。Spotと組み合わせることで、面的に移動しながら広域カバーが可能になります。
◆ 主な用途例(実務ベース)
■ モーター・ポンプなど回転機械の状態監視
- 振動によるベアリングの摩耗、軸の偏心、異常共振などを可視化
- 高価な加速度センサ不要で診断可能
■ 鉄道・橋梁構造物の健全性評価
- 通過列車による床版のたわみや梁の応力変化を非接触で測定
- 仮設足場が不要なため点検負荷が大幅軽減
■ 風力発電・配電施設での異常兆候検出
- 設備の周期的なブレ・不均等振動の検出
- 接触不要なため絶縁が必要な高電圧設備でも使用可能
- 用途例:
- モーターやポンプの異常検知
- 鉄道・橋梁構造の状態監視
2.5 LiDARセンサー(ナビゲーション・SLAM用途)
LiDAR(Light Detection and Ranging)は、レーザーを用いて対象物までの距離を高精度に測定する技術です。
Spotに搭載されるLiDARセンサーは、自己位置推定(SLAM: Simultaneous Localization and Mapping)や障害物回避、環境マッピングといった自律移動の根幹を支える中核的なセンサーです。
可視光やカメラによる認識と異なり、LiDARは昼夜・照度・天候に左右されず安定した空間認識が可能であり、インフラ点検や巡回監視といった作業におけるナビゲーション性能の信頼性を大きく向上させます。
◆ SpotにおけるLiDARの主な役割
- リアルタイム環境認識:周囲の障害物や空間形状を把握
- 動的マップ生成(SLAM):自己位置と地図を同時に生成
- ナビゲーション支援:自律巡回・帰還動作における判断材料を提供

出典: 東北エンタープライズ株式会社
https://spot-teco.jp/payload/eap2
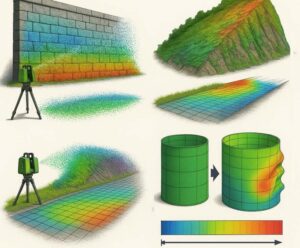
2.6 3Dレーザースキャナー(高精度点群取得・計測用途)
3Dレーザースキャナーは、レーザー光を用いて物体や地形の形状を高密度・高精度な点群データとして取得する測定機器です。これにより、現場の空間をミリ単位で三次元的に記録・モデリングでき、設計・施工・検査の各フェーズで不可欠なツールとなっています。
LiDARが主に自律移動・障害物検知を目的にするのに対し、3Dレーザースキャナーは正確な三次元測量・計測に特化しており、Spotに搭載することで、これまで三脚設置が前提だった作業を“歩きながら”実行可能にするという大きな変革をもたらします。
◆ Spotにおける3Dスキャナー活用の意義
- 連続走行スキャンによる面的データ取得
Spotの安定した移動により、手動では難しい長距離・広範囲のスキャンが一括で可能 - 危険区域や高所・狭所でも安全に計測
人が立ち入れにくい場所でも、遠隔操作や自律移動により人手を介さず高精度スキャン - 高精度点群と他センサー情報の統合
IR画像、振動、音響といった他ペイロード情報と組み合わせて総合診断に活用
◆ 搭載可能な代表スキャナー(2024年時点)
■ FARO Focus Sシリーズ
- 建築・土木業界での点群標準スキャナー
- 測距精度:±1mm @10m
- スキャン範囲:最大350m
- IP54/屋外対応・タッチパネル付き
- Spotへの搭載:自律点検+定点精密計測のハイブリッド運用に最適

■ Leica BLK360 G2
- コンパクトかつ高速スキャンが特長の軽量モデル
- 点群取得速度:約68万点/秒
- スキャン1回の取得時間:20秒以下
- スマートフォン・iPadとの連携可
- Spot搭載時の運搬負担が少なく、頻繁な位置移動に最適
■ Trimble X7
- 自動キャリブレーション/整準機能を搭載した業界最高峰のモバイルスキャナー
- 点群取得精度:±2mm以内
- 完全自律補正により、現場でのスキャン誤差を最小限に
- 難環境(高低差・不整地)でもSpotと安定連携
◆ 用途事例(高精度スキャン業務)
■ 土木・建築現場での進捗管理
- 構造物の施工精度確認
- 切土・盛土の体積管理
- 配筋・設備位置の変位モニタリング
■ 橋梁・トンネルの変状検出
- 部材のたわみ・沈下・クラック変位の点群比較(Before/After)
- スパン長・角度・高さ等の寸法データを抽出し、3D設計との照合
■ 災害後の構造物調査
- 土砂災害/地震後の地形変化の点群可視化
- 倒壊建物の変位・傾斜の定量的評価
- 被災構造物の復旧計画に向けた形状記録
2.7 通信機器(モジュール類)
遠隔地との接続を確保するため、Spotには複数の通信モジュールが実装可能です。屋外環境や災害現場など、インフラ未整備区域でも使用可能な構成が求められます。
- 構成例:
- LTE/5Gモデム
- 衛星通信(Starlink等)
- ローカルWi-Fi中継機
- 用途例:
- 遠隔地との映像・点群データ送信
- 複数Spot間のリアルタイム同期
3. 業界別ユースケース:Spot+ペイロード活用事例一覧
建設業界
目的: 現場の進捗管理/施工状況の記録/設計との照合
使用構成: Spot + 3Dレーザースキャナー(FARO Focus、Leica BLK360 など)
活用内容:
- Spotが指定ルートを自律巡回しながら、連続的な点群スキャンを実行
- 取得データを用いて、施工図との整合性確認や出来形管理を実施
- 定期スキャンを比較することで、工事進捗の可視化・定量化が可能
導入効果:
- 測量作業の省力化(人員1/3)
- 足場不要、危険箇所での遠隔計測
- 点群+映像による報告書作成の自動化
インフラ点検
目的: 橋梁・トンネルなど大型構造物の健全性診断/変状記録
使用構成: Spot +振動可視化カメラ+ 3Dレーザースキャナー
活用内容:
- 橋梁の振動挙動(共振・ゆがみ)を非接触で視覚化
- 必要に応じて3Dスキャンを実施し、変位量やたわみ形状を点群で記録
- 対象箇所の異常傾向は、AIによるトレンド解析に応用可能
導入効果:
- 点検足場・交通規制の削減
- 点群データと映像での客観的記録
- 精度・網羅性の高い構造診断
プラント管理(製造業・化学工場など)
目的: バルブや配管からの漏れ・異音・発熱等の異常検知
使用構成: Spot + SpotCAM(赤外線対応)+超音波カメラ
活用内容:
- Spotが定期ルートに沿って巡回し、IRカメラで異常温度を検出
- 同時に漏れ音・異音の発生源を音響イメージとして記録
- 高温・高所エリアなど人が近づけない環境でも非接触・安全な診断が可能
導入効果:
- 日常巡回の自動化と報告業務の効率化
- ガス漏洩・過熱・故障の早期発見による重大事故回避
- 手順標準化と属人性の排除
災害対応・危険区域調査
目的: インフラ被害の把握/立入困難区域の状況確認/初動判断支援
使用構成: Spot + LiDAR(SLAM支援)+ 通信モジュール
活用内容:
- Spotが被災エリアへ自律進入し、リアルタイムで映像・位置情報を送信
- LiDARによって周囲の地形・瓦礫配置をマッピング
導入効果:
緊急対応の意思決定を加速pot活用事例
二次災害の回避(人的立ち入り前に現地把握)
避難判断/復旧計画への活用
4. まとめ:Spotは現場革新の“プラットフォーム”へ
Spotは、単なる移動型ロボットではなく、各種センサー・装置を統合して機能する「モバイルセンサープラットフォーム」です。
LiDARによるナビゲーション、3Dレーザースキャナーによる高精度点群取得、Spotアームによる遠隔作業、IRカメラや音響・振動センサによる異常検知など、多彩なペイロードを組み合わせることで、用途に応じた柔軟な現場対応が可能になります。
これまで人手に依存していた巡回点検、状態監視、デジタル記録、設備診断といった作業を、Spotが一体的かつ安全に実行することで、省人化・省力化・デジタル化を一挙に実現します。
今後も、建設、インフラ、製造、エネルギー、防災など、さまざまな分野において、現場のニーズに即した専用ペイロードの開発やソフトウェア連携が進むことで、Spotの導入メリットはますます拡大するでしょう。
「巡回する、観測する、操作する」――それらを1台で完結できる時代へ。Spotは、現場業務における“革新の起点”となり得る存在です。

参考文献・出典一覧
◆ Boston Dynamics 関連
- Boston Dynamics – Spot 製品公式ページ
https://bostondynamics.com/products/spot/ - Boston Dynamics – Spot Arm
https://bostondynamics.com/products/spot/arm/ - Boston Dynamics – Payloads Overview
https://bostondynamics.com/products/spot/payloads/ - Boston Dynamics – Orbit(ミッション管理クラウド)
https://bostondynamics.com/orbit/
◆ Spot国内販売・運用事例
- Spot テクニカル情報ポータル(東北エンタープライズ株式会社)
https://spot-teco.jp/ - Spot ペイロード紹介ページ(日本語)
https://spot-teco.jp/payload/ - Spot 活用事例/施設点検等
https://www.tohoku-enterprise.com/products/cautious/ - 活用紹介コラム
https://key-s-c.co.jp/column/%e5%9b%9b%e8%b6%b3%e6%ad%a9%e8%a1%8c%e3%83%ad%e3%83%9c%e3%83%83%e3%83%88%e3%81%a7%e9%9d%a9%e6%96%b0%e3%81%99%e3%82%8b%e4%b8%89%e6%ac%a1%e5%85%83%e6%b8%ac%e9%87%8f
▼ 3Dレーザースキャナー
- FARO Focus Premium – 製品概要
https://www.faro.com/products/laser-scanners/focus/ - Leica BLK360 G2 – Leica Geosystems
https://leica-geosystems.com/products/laser-scanners/leica-blk360 - Trimble X7 – Geospatial Laser Scanning
https://geospatial.trimble.com/products-and-solutions/trimble-x7
◆ 通信機器・クラウド環境
- Boston Dynamics – Spot 通信インフラ構成に関する技術資料
https://bostondynamics.com/products/spot/specs/